

 DIVERTISSEMENT
DIVERTISSEMENT INDUSTRIE
INDUSTRIE INSTITUTIONS
INSTITUTIONS SERVICES
SERVICES RESSOURCES
RESSOURCES DIVERS
DIVERS CDCF
CDCF PROJET
PROJET IMAGINATION
IMAGINATION PROTOTYPE
PROTOTYPE ÉTUDE DE CAS
ÉTUDE DE CAS PROGRÈS
PROGRÈS ÉCOLOGIE
ÉCOLOGIE TRV. PRATIQUES
TRV. PRATIQUES STRUCTURE
STRUCTURE MESURE
MESURE MODÉLISATION
MODÉLISATION RÉSEAUX
RÉSEAUX PROGAMMATION
PROGAMMATION
les systèmes embarqués
présentation
Plutôt qu'un système automatisé universel effectuant plusieurs tâches, le système embarqué est étudié pour n'effectuer que des tâches bien précises, voire la réalisation d’une seule fonction technique.
Un système embarqué, embedded system, est un système électronique et informatique autonome, de taille réduite, qui réalise, souvent en temps réel, une tâche particulière au sein de l’appareil auquel il est intégré (embedded signifie intégré, incorporé ou enfoui). Les systèmes embarqués ne sont pas toujours des modules indépendants. Ils sont souvent intimement mêlé au dispositif qu'ils contrôlent. Certains, à qui on n'impose pas d'être performant, permettent néanmoins de simplifier le système global et d'en réduire le coût de fabrication en évitant le recours à un API (automate programmable industriel) plus onéreux.
Beaucoup d'appareils aujourd'hui comportent des systèmes embarqués, que ce soit dans l'électroménager, les transports ou l'IoT (Internet of Things). À noter que le terme de "système embarqué" désigne simultanément le matériel et le logiciel utilisés. Les systèmes embarqués utilisent généralement des microprocesseurs à basse consommation d'énergie ou des microcontrôleurs, dont la partie logicielle est en partie ou entièrement programmé dans le matériel : on parle alors de firmware inscrit en mémoire morte (lecture seule) ou en mémoire flash. Ils fonctionnent le plus souvent avec des ressources matérielles limitées : IHM réduite (Interface Homme Machine), voire absente, alimentation réduite en énergie dans les systèmes isolés ou mobiles (batteries, panneaux solaires).
Exemple : trois équipements mobiles autonomes contenant un système embarqué



 laveuse autonome
laveuse autonome robot mBotrobot aspirateur
robot mBotrobot aspirateur
Un système embarqué présente deux caractéristiques principales : une taille limitée pour un encombrement réduit, et une consommation énergétique minime. Les autres contraintes du système embarqué peuvent être :
- un espace mémoire limité (quelques Go maximum)
- une puissance de calcul limitée
- une autonomie plutôt réduite
- des délais d’exécution courts (traitements souvent en temps réel)
- une sécurité et une sûreté essentielles (systèmes vitaux, de gestion de l'énergie…)
- une fiabilité cruciale (systèmes critiques à taux de panne zéro)
Les domaines dans lesquels on trouve des systèmes embarqués sont de plus en plus nombreux :
- transport : automobile, aéronautique (avionique)
- astronautique : fusée, satellite artificiel, sonde spatiale
- militaire : missile
- télécommunications : téléphonie, routeur, pare-feu, serveur de temps, smartphone
- électroménager : télévision, four micro-ondes, lave-linge
- impression : imprimante multifonctions, photocopieur
- informatique : disque dur, lecteur de CD/DVD/BR
- multimédia : console de jeux
- guichet automatique : bancaire (DAB)
- équipement médical : monitoring
- météorologie : station météo
- …
composition : examen du mBot
Un système embarqué, comme tout système automatique, est composé généralement d'une partie commande et d'une partie opérative. La partie commande assure le pilotage et le contrôle du système. Elle est composée, dans le mBot, d'un microcontrôleur ATMega 328P installé sur une carte électronique appelée mCore, compatible Arduino Uno pour la gestion et la programmation. La partie opérative du robot effectue les opérations en produisant ses déplacements, de la lumière, des sons, etc. Cette partie opérative est composée de capteurs, d'actionneurs et d'effecteurs.
Capteur
Il détecte les informations de son environnement qui sont indispensables au bon fonctionnement du système embarqué. Le capteur réagit en fonction d'une grandeur physique. Sur le mBot de base, le système détecte la distance d'un obstacle à l'avant évaluée par ultrasons, le niveau de luminosité ambiante et la présence d'une ligne noire au sol sous le robot. On peut rajouter des capteurs supplémentaires comme : thermomètre/hygromètre ambiant, accéléromètre/gyroscope 3 axes, détecteur de mouvement PIR, microphone, capteur de couleur…
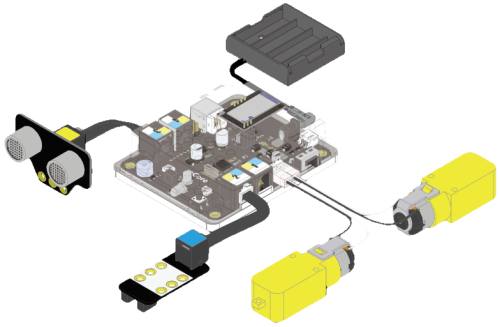
Actionneur
C'est un élément de la partie opérative qui produit un phénomène physique. Dans le cas du mBot, les deux moteurs à courant continu produisent, par l'intermédiaire de trains d'engrenages, la rotation des roues du robot, et donc son déplacement. Un buzzer émet des sons à une fréquence déterminée, tandis que deux diodes électro-luminescentes émettent une lumière de couleur, choisie elle aussi. Des actionneurs supplémentaires peuvent être ajoutés à ceux existants de base : DELs RGB, matrice à DELs, servo-moteur, moteurs pas à pas ou à courant continu…
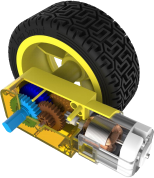
Effecteur et chaîne cinématique
L'effecteur finalise le travail de l'actionneur en produisant l'effet attendu. La chaîne cinématique est une structure composée d'éléments de transmission, de transformation, de guidage… qui permettent de rendre exploitable, par l'effecteur, l'énergie de sortie de l'actionneur. Par exemple sur le mBot, ce sont les roues qui, en tournant dans un sens ou l'autre, produisent les déplacements du robot. Une chaîne cinématique relie le moteur (actionneur) à la roue (effecteur). Cette chaîne contient des engrenages appelés moto-réducteur qui réduisent la vitesse de rotation du moteur. Certains actionneurs n'ont pas besoin d'effecteur : c'est le cas des DELs RGB et du buzzer par exemple.
Pupitre
C'est un élément qui permet l'échange d'informations entre l'Homme et le système automatisé. On l'appelle quelquefois l'Interface Homme-Machine (IHM). Ces informations peuvent être des consignes dans le sens Homme→ Machine, et des messages, ou signaux, dans le sens Machine→ Homme. Dans le cas du mBot, les éléments du pupitre sont intégrés directement à la carte mCore. On y trouve un bouton poussoir et des DELs.
échange d'informations
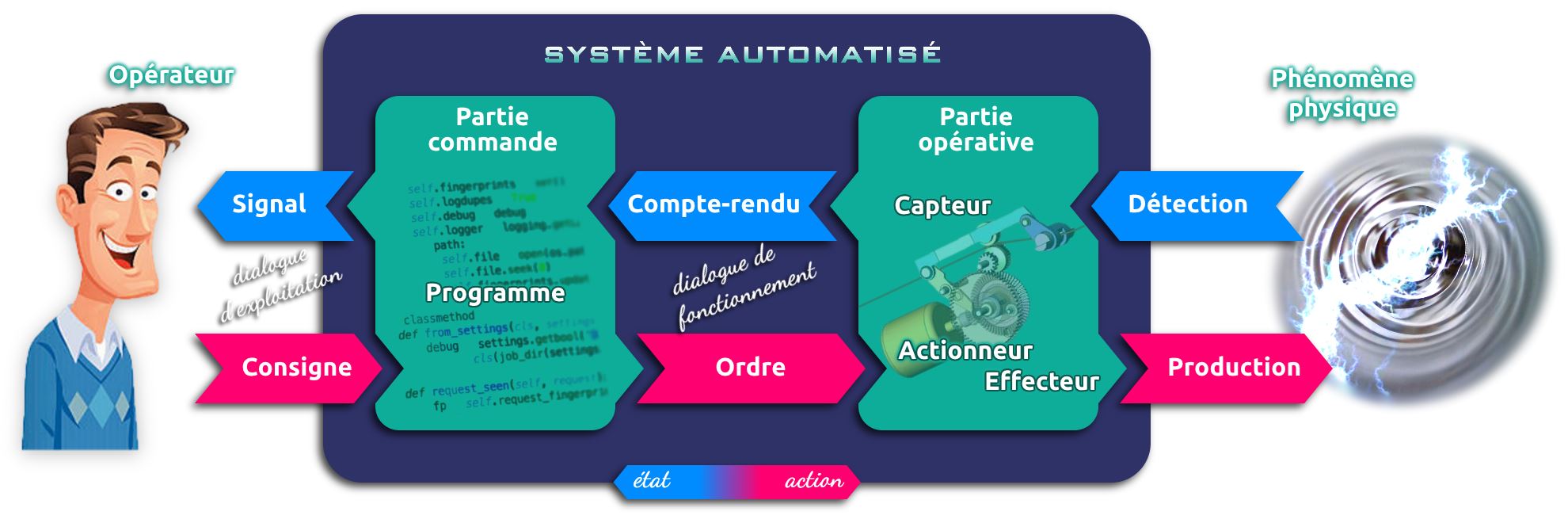
Les systèmes embarqués sont des systèmes automatisés, donc…
L'ensemble des échanges d'informations est contrôlé par le programme de la partie commande :
- L'opérateur donne des consignes à la partie commande.
- La partie commande adresse des ordres à la partie opérative.
- Les actionneurs/effecteurs exécutent les ordres reçus : production d'un phénomène physique.
- Les capteurs réagissent à une variation d'état : détection d'un phénomène physique.
- La partie opérative adresse des comptes-rendus à la partie commande.
- La partie commande envoie à l'opérateur des signaux sur l'état du système ou de son environnement.
Il s'établit un dialogue d'exploitation entre l'opérateur et la partie commande, et un dialogue de fonctionnement entre la partie commande et la partie opérative.
Schéma de principe
Exemple du mBot
...en cours de rédaction les signaux infrarouges envoyés d'une télécommande spécifique, et enfin les signaux radio (Bluetooth ou Wifi 2,4GHz) pour connecter le système à son interface de programmation (attention, si le mode choisi est "connecté" on n'est plus dans un système embarqué classique...
(déplacement d'un objet, dégagement de chaleur, émission de lumière, production d'un champ magnétique ou de son…) à partir de l'énergie qu'il reçoit. Il transforme un type d'énergie en un autre. 'est l'outil mis en mouvement par les actionneurs (ressort, vérin, moteur…) via une chaîne cinématique. C'est l'élément terminal de la chaîne d'action d'une chaîne fonctionnelle. Il agit directement sur l'élément à modifier.